(a) Let the mass 1 be displaced by x1 and mass m2 by x2. The force due to the spring on the left acting on mass 1 is −kx1 and that due to the coupling is −k(x1 − x2).
The net force
F1 = −kx1 − k(x1 − x2) = −k(2x1 − x2)
The equation of motion for mass 1 is mx1 + k(2x1 − x2) = 0 (1)
Similarly, for mass 2, the spring on the right exerts a force −kx2, and the coupling spring exerts a force −k(x2 − x1). The net force
F2 = −kx2 − k(x2 − x1) = −k(2x2 − x1)

In order that the above equations may have a non-trivial solution, the determinant formed from the coefficients of x1 and x2 must vanish.

In (12) and (13) the amplitudes are not all independent as we can verify with the use of (7) and (8). Substituting (10) and (12) in (7), yields A2 = A1. Substitution of (11) and (13) in (7), gives B2 = −B1.
Dropping off the subscripts on A s and B s the solutions can be written as
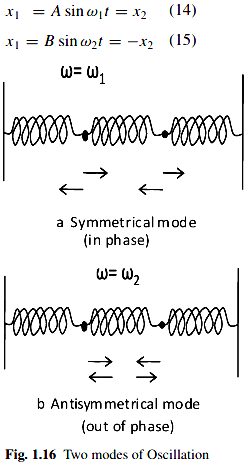
If initially x1 = x2, the masses oscillate in phase with frequency ω1 (symmetrical mode) as in Fig. 1.16(a). If initially x2 = −x2 then the masses oscillate out of phase (asymmetrical) as in Fig. 1.16(b)








